

NASA’s SPLICE is the landing app Apollo didn’t have
When the Apollo missions headed to the Moon, astronauts knew basically where they were going to land before they even left. Then they used their eyes to do the rest. But as we ramp up to the next era of space exploration, we will want to land our spacecraft safely in areas that we don’t have mapped out well, often without the benefit of human vision on-board, and we want to get there efficiently.
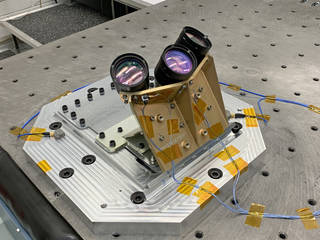
A&A developed guidance algorithms that determine efficient trajectories to arrive at that great parking spot. These guidance algorithms work together with additional algorithms that pull in streams of sensor, lidar and camera data to calculate the velocity and position of a landing spacecraft, and to detect previously unknown hazards on the surface. This suite of algorithms and technologies have now flown on two Blue Origin New Shepard missions. Spacecraft will use these algorithms, or variants of them, to find an optimized and precise landing location and determine the most efficient trajectory to get there. Future landers will be able to land safely and more precisely in ways they could not before.
Researchers in A&A’s Autonomous Control Lab and the RAIN Lab developed the guidance algorithms under NASA’s “Safe and Precise Landing - Integrated Capabilities Evolution” or “SPLICE” program, which is developing a suite of lunar landing sensors, computers and algorithms working together for landing.
Cameras and other instruments on a spacecraft will capture altitude and terrain characteristics. The A&A algorithms will then kick in to process the information, guide the vehicle to a desired location on a trajectory that keeps the cameras pointed at the landing site, thus helping the onboard vision algorithms make more informed decisions on a safe landing spot.
This research, led by Miki Szmuk (A&A '19), Taylor Reynolds (A&A ’20), and Danylo Malyuta (A&A '21), will help modernize precision landing and is valuable for future missions to the Moon and Mars, as well as asteroids.
Another application for UW-defined “state-triggered constraints”
Reynolds credits colleague Miki Szmuk (A&A ’19) for laying the groundwork for these algorithms. Szmuk had the “a-ha” moment on a new method to solve for trajectories with challenges like these, which he dubbed “state-triggered constraints.”
Szmuk explains, “These are constraints that become active only when you meet some sort of condition, and what’s tricky about it is that there is a circularity to the conditions. The solution to what trajectory you are going to take depends on when conditions are met, but conditions you meet depend upon the trajectory.” As Taylor sees it, “Miki developed a way to handle these constraints directly and without an ‘engineering hack.’ “
The resulting algorithms provide new ways to embed discrete decision making into continuous trajectory design. For example, if a camera sensor only needs to point at the ground above a certain altitude, when should the vehicle cross that altitude threshold? Or, if a speeding lander can only maneuver laterally at low speeds, what is the best time to fire the rockets and slow down? State-triggered constraints allow us to find trajectories that answer these types of questions using an efficient series of computations.
Similar discrete decisions appear in other problems autonomous applications as well, notably self-driving cars, spacecraft rendezvous and docking.

“Our contributions to the SPLICE program not only is a testimony to our close collaborations with colleagues at NASA and Blue Origin built over many years, but also reflect our commitment to take high caliber research developed in academia to NASA and the space industry.”
— Mehran Mesbahi
The UW advantage
Szmuk says, “We were very fortunate to have the opportunity to work on these algorithms as part of our graduate school research. It is very rare that a professional engineer, much less a PhD student, gets to have one of their algorithms fly in space. It’s a testament to the work that Taylor, Danylo, and the rest of the team did to make this happen, and that our faculty have been able to provide us with these kinds of opportunities.”
Professor Mehran Mesbahi continues, “At A&A, we are in a unique position to make major contributions to various aspects of next-generation space systems. Our contributions to the SPLICE program not only is a testimony to our close collaborations with colleagues at NASA and Blue Origin built over many years, but also reflect our commitment to take high caliber research developed in academia to NASA and the space industry. Our vision and research efforts, and most notably, the excellence of our students, underscore this overarching commitment.”

Danylo Malyuta adds, “Our work on optimization-based landing is important not just for all of spaceflight, including applications such as autonomous rendezvous and docking, but also for the vast field of robotics in everyday life. The tight computational and performance margins of rockets and spacecraft force us to come up with nimble yet powerful algorithms that execute in real-time on computationally constrained systems. This means that our methods stand a good chance of being relevant for autonomous cars, industrial robots, and walking robots, to name a few.”
A&A developed these algorithms under NASA’s SPLICE technology development program, in collaboration with NASA Johnson Space Center (JSC), Blue Origin, and Draper Laboratory. A&A researchers include Professor Mehran Mesbahi, Professor Behcet Açıkmeşe, Taylor Reynolds, Danylo Malyuta, Michael (Miki) Szmuk and Daniel Dueri and Unsik Lee.
A successful Mars rover landing ends with a crash
The suggestion was even surprising to NASA administrators. Engineers proposed that the very last stage of landing for a Mars rover would be the hurling of the hovering sky crane to crash at a safe distance. And for the landings of Curiosity (2011) and Perseverance (2020), that’s exactly what NASA did.
The famous “seven minutes of terror” of a spacecraft’s Entry, Descent and Landing on Mars slows the rover’s spacecraft from about 12,500 mph as it enters the Martian atmosphere to a delivery on the Martian surface. In a series of stages as the craft gets closer to landing, it deploys a supersonic parachute, loses its heat shield and then starts the “powered descent” phase at about 6900 feet of altitude. At this point, engines fire up to counter the descent and slow the vehicle down to a mere 1.7 mph. For the last twelve seconds, the sky crane mode gently lowers the rover to a soft landing with a winch-like cable system.
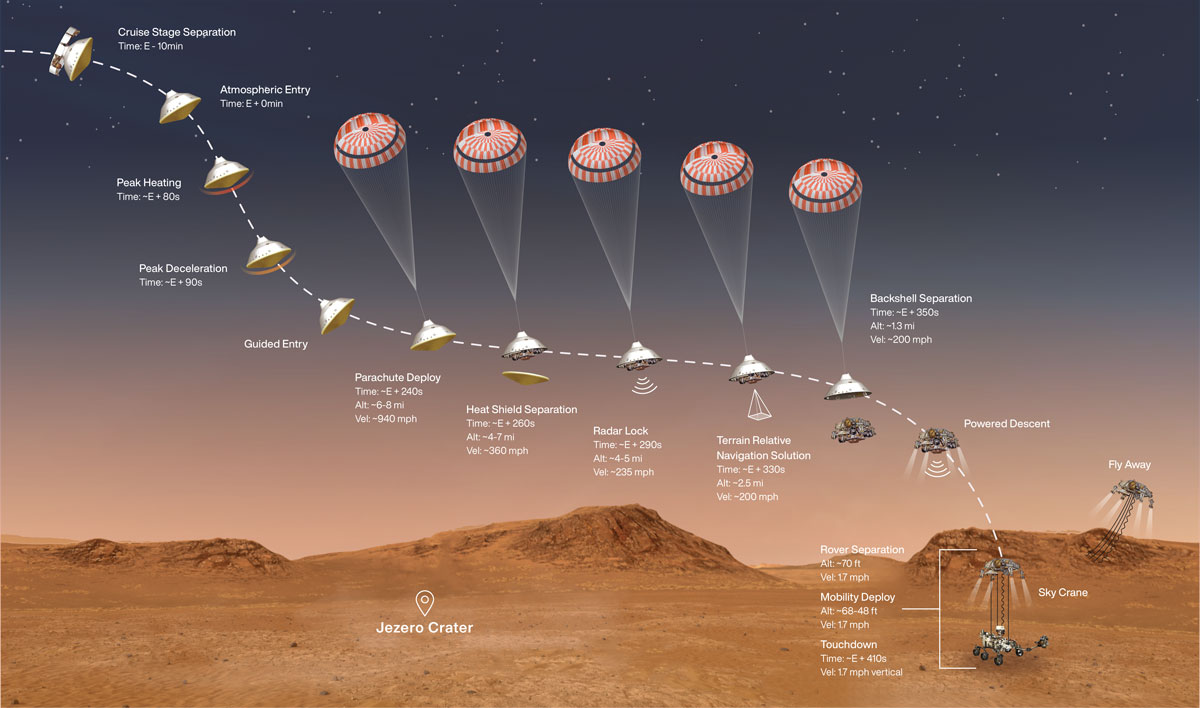
And this is the precise moment when A&A’s Behcet Açıkmeşe’s research deploys into action to remove the sky crane from any possible position to damage the rover. The sky crane, once its job is done with the rover safely deposited, poses a threat as a large, hovering piece of equipment. Engineers deemed that the safest maneuver would be hurling the machinery as far from the rover as possible. For the Curiosity landing in 2011, Açıkmeşe jokes that his algorithms served up the first human-made crater on Mars.

Açıkmeşe, who has a joint appointment with NASA, helped develop these hurling algorithms for Curiosity which NASA used again for the 2020 Perseverance landing. He notes two unique engineering challenges for space landings: “First, we have no recovery. We have one shot at landing these rovers and the only outcomes are total success or total failure. Second, the first time these landing systems are fully tested is when we are executing the mission. There is no way to test in closely simulated conditions.”
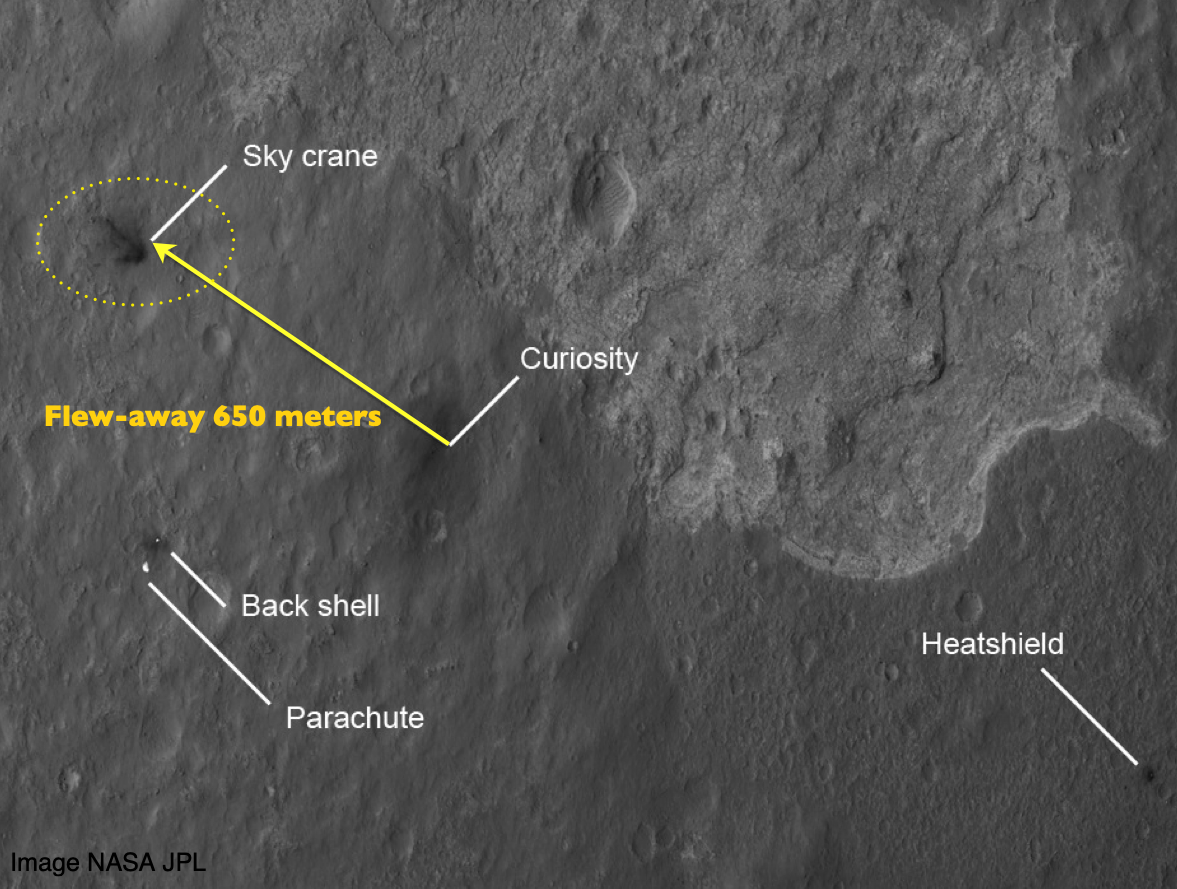
A primary challenge in the “fly away” mode of the sky crane was to stabilize it before steering it away. If the sky crane is not stabilized, the thrust plumes could affect the rover’s sensors. Açıkmeşe notes that the window to violently dispose of the sky crane is only a few seconds after the rover is delivered. He says, “Then the programming slices the cable, and we have to immediately turn the vehicle and launch to fly away as far as possible.” For Curiosity, the sky crane successfully crashed 650 meters from the rover's landing location and earned NASA’s final ruling of a successful landing.

SOC-i: Training for SPLICE capabilities

A&A’s “SOC-i” CubeSat (pronounced “sockeye” after the iconic PNW salmon), which has secured a launch spot in an upcoming NASA mission, served as an incubator for some of the concepts of UW’s contribution to NASA’s SPLICE project. Specifically, SOC-i orients itself and aims its camera depending upon that orientation using algorithms that are similar to those developed for the SPLICE project. While SPLICE is solving for a more complex trajectory generation problem, SOC-i is providing good practice on the orientation and imaging functions to process information.
SOC-i laid some important groundwork to A&A’s contribution for SPLICE. Researchers thought through how to integrate these algorithms within a traditional Guidance, Navigation and Control (GNC) system and practiced implementing such algorithms for a "real" system. Also, the SOC-i release will be the first time that an on-orbit spacecraft will use an algorithm like this to plan its trajectories without prior knowledge of what they will be. For GNC systems, this is a paradigm shift that for now is inherently more risky. SOC-i will be able to provide a working example of optimization-based trajectory planning to give credence to the method.

Space vehicles like SpaceX’s Falcon 9 are designed to be reusable. But this means that, like Olympic gymnasts hoping for a gold medal, they have to stick their landings - over and over again. Landing is stressful on a rocket’s legs because they must handle the force from the impact with the landing pad. One way to combat this is to build legs out of materials that absorb some of the force and soften the blow.
A&A researchers, led by Professor Jinkyu Yang, have developed a novel solution to help reduce impact forces — for potential applications in spacecraft, cars and beyond. Inspired by the paper folding art of origami, the team created a paper model of a metamaterial that uses “folding creases” to soften impact forces and instead promote forces that relax stresses in the chain, promoting reusability and a softer landing.
Credit: Sarah McQuate, UW News
Supersonic retropropulsion: If you want to land big
While NASA has sent a number of landers and rovers to Mars, we need better methods to land a large spacecraft. One major challenge in landing a large craft is slowing it down from orbital speeds to a touchdown that will be gentle enough for its payload or humans to sustain.
Parachutes, airbags and sky cranes used to safely land smaller spacecraft will be insufficient. Larger vehicles will be too heavy for aerodynamic drag to sufficiently slow the vehicle for these other technologies to be deployed. A new approach is needed for these larger loads of the future.
To this end, A&A researchers, led by Assistant Research Professor Owen Williams and supported by Blue Origin, are researching supersonic retropropulsion (SRP). This technology slows the vehicle by firing its engines into the oncoming high-speed flow. However, these jets could cause the flow around the spacecraft to become unstable, potentially destroying the original mission.

Williams and his team are trying to solve this instability issue. They are using a laboratory simulation to create brief bursts of supersonic flow that are opposed by small supersonic jets delivered in a compact Mach 2 Ludweig tube wind tunnel. The team can observe the influence of jet pressure and vehicle geometry on the unsteadiness to solve this part of the challenge.