

Amy Sprague
March 6, 2025
A&A Ph.D. candidate Skye Mceowen has won the prestigious Graduate Student Paper Competition at the recent 2025 AIAA SciTech Conference for Guidance, Navigation, and Control (GNC).
Listen to this story:

A&A Ph.D. candidate Skye Mceowen
This award celebrates Mceowen's work on auto-tuned primal-dual successive convexification (Auto-SCvx), a versatile algorithm designed for solving complex optimization problems in trajectory design, with broad applicability to other domains. Her award-winning paper demonstrates the algorithm’s capabilities through its application to hypersonic reentry guidance. Mceowen collaborated with others in A&A’s Autonomous Controls Lab, led by Professor Behcet Acikmese.
Many real-world engineering problems involve complex, nonlinear relationships that make them challenging to solve reliably and efficiently. Traditional optimization methods for trajectory design often require extensive manual tuning of parameters - a time-consuming process that can be unreliable when conditions change. Mceowen's Auto-SCvx algorithm addresses this fundamental challenge by automatically adjusting its parameters as it solves problems, eliminating the need for manual tuning while improving reliability across different scenarios.
The algorithm works by breaking down complex (nonconvex) problems into a sequence of simpler (convex) subproblems that can be solved efficiently. What sets Auto-SCvx apart is its innovative approach to automatically updating penalty weights for constraint violation to help guide the solution process. The algorithm’s mathematical techniques for handling constraints makes it particularly effective for sensitive problems where problem parameters and algorithm hyperparameters are tightly coupled.
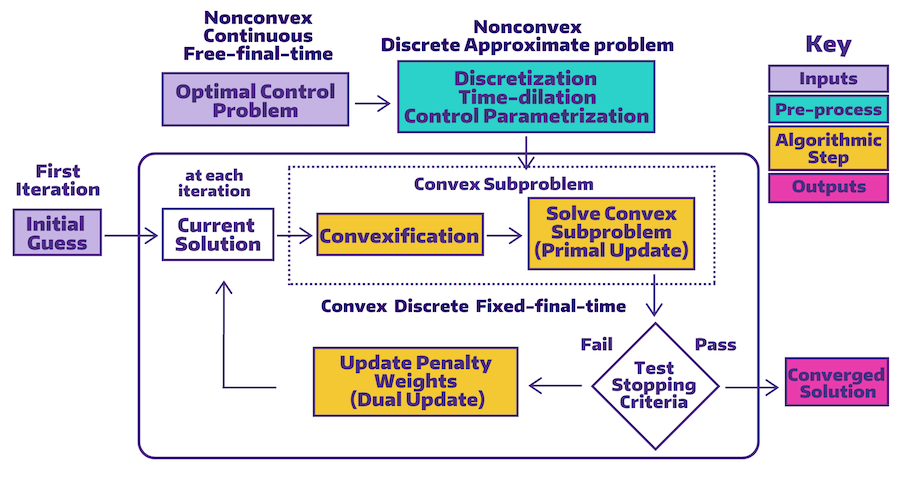
The image is a flowchart illustrating a process for solving an optimal control problem. At the top, the process starts with a "Nonconvex Continuous Free-final-time Optimal Control Problem" which transitions to a "Nonconvex Discrete Approximate problem" through "Discretization, Time-dilation, and Control Parametrization." The next section is a "Convex Subproblem," which includes iterative steps labeled "Convexification" and "Solve Convex Subproblem (Primal Update)." There is a loop indicating these steps repeat until they meet the "Test Stopping Criteria." If the test fails, the process loops back to "Update Penalty Weights (Dual Update)." If it passes, it results in a "Converged Solution." The flowchart sections are color-coded corresponding to a key, with inputs in lavender, pre-process steps in teal, algorithmic steps in yellow, and outputs in pink.
Hypersonic reentry – the process of a spacecraft returning to Earth's atmosphere at extremely high speeds – provides an excellent test case for demonstrating Auto-SCvx’s capabilities. Designing reliable trajectories for these vehicles is crucial, especially as reusable spacecraft become more common. Traditional methods for trajectory design often rely on offline algorithms or predictor-corrector methods, which have limitations when it comes to handling mission changes, anomalies, inequality constraints, or modeling errors.
For the reentry application, Mceowen tested Auto-SCvx on various hypersonic reentry models for a reusable launch vehicle. The algorithm successfully managed problems with different control parameterizations, including using both bank angle and angle-of-attack as control inputs. The inclusion of angle-of-attack as an additional control input allows modulation of the lift-to-drag ratio for maneuvering the vehicle. This demonstration showed that Auto-SCvx could reliably solve complex problems with equal or improved performance compared to existing methods, even as mission parameters changed significantly.
The algorithm’s success with hypersonic reentry – one of the more challenging problems in aerospace guidance – highlights its potential for other applications. Its ability to automatically tune parameters while maintaining computational efficiency makes it particularly valuable for real-time control applications. The mathematical framework developed in this research provides a structured approach for handling complex constraints that could benefit many fields where traditional optimization methods struggle with reliability or require extensive manual tuning.
A visualization of the auto-tuning sequence applied to hypersonic reentry.
"This research represents a significant advance in optimization algorithms," says Professor Acikmese. "While the hypersonic reentry results are impressive, what's particularly exciting is that Auto-SCvx provides a general framework for solving complex optimization problems without manual tuning. As we see more autonomous systems being deployed across industries - from spacecraft to robots to energy systems - having reliable, self-tuning algorithms becomes increasingly critical. Skye's work gives us a powerful new tool."
This research received support from the Office of Naval Research, NASA, and the NASA Johnson Space Center.
Go to the source
Skye Mceowen, Daniel J. Calderone, Aman Tiwary, Jason S. Zhou, Taewan Kim, Purnanand Elango and Behcet Acikmese. "Auto-Tuned Primal-Dual Successive Convexification for Hypersonic Reentry Guidance," AIAA 2025-1317. AIAA SCITECH 2025 Forum. January 2025.